
在这个理论上基础上,六个自由度可以,那么四个行不行?三个行不行,最少是多少?它拍动的频率应该是多少?拍动的幅度是多大?尾鳍的形状会不会影响鱼行走的速度?
我们经过研究最后得出结论:从工程上来解释的时候,两个自由度最佳,因为它自由度小,意味着方便制造、设计和装配。
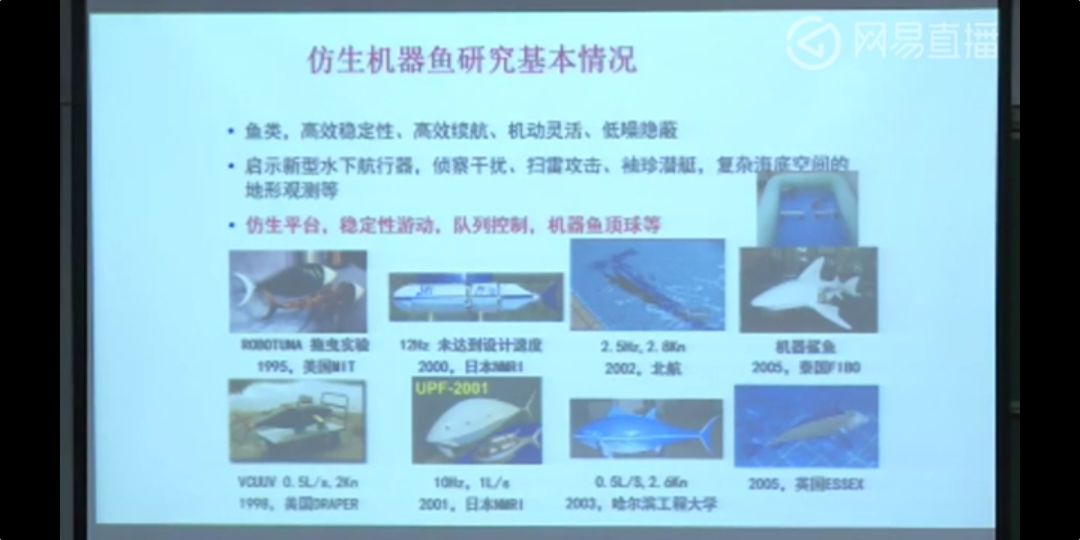
用这张图来说明我们在不同时期所设计的机器鱼。
为了深入地研究这些关系,会指导学生去深入研究流体力学所产生的一些科学问题,包括研究一些拍动的频率幅度弓角和相位差,用到推力频率和推动之间的数学模型上,来研究效率。
这一点非常自豪,感觉通过我们的研究,采用仿生推进机理的效率比传统螺旋桨要高,因为拍动的时候它一定会有效率有力,而且会平滑很长时间,不像螺旋桨空的时候有空泡,有时候有做负功。
在这样的研究下,今日新闻,我们一直想提高速度。比如一个海豚,小海豚假设60公斤,它的推力是什么?在一个水池里,架子上有一个力传感器,然后通过线来拍动它;当拍动的时候,力传感器为零,那么鱼的重量就正好是推力的重量。
那么在实际的这个应用中,如何搭建这个平台?
我们有两个方案:
一个方案是在一个有水潮的水池里,有8根张线,每个张线有力传感器,水潮按照一定速度来流,流的速度正好可以被检测到;后面尾气的大小可以换方的,可以换窄的,可以换协调,然后推动来使这个鱼往前走。当游的速度正好和水的速度相同的时候,绳子上的力从理论上讲,δ就趋近于0,那么这时候就能估算出这个机器鱼的速度,随后就可以换不同尾鳍的形状,换拍动的频率,换拍动的幅度,换两个自由度等等。
为了更科学地来计算它,可以在水池里打上类似粒子的东西。
我们目前把研究课题组分成了两个小组:一个小组接着再做解决仿真机器鱼速度的问题;另一个是在思考能不能跟海空跨介质一起。这样的一些项目我们还在研究和论证中。
第二个方案是把机器鱼的智能材料应用在工业界,这就是我们所说的软体手。
工业机器人只能从事0.5%到1%的工作,99%的工作基本上还替代不了。当然这个比例现在还在增加,但不管怎么样,其中很重要的研究课题是机器手的灵巧作业。

国际瞭望